Introduction
Battlecode is a programming competition run by students at MIT. Competitors compete to develop the best game playing algorithm over a month long period.
This year, I led my team 3MiceWalkIntoABar through U.S. Qualifiers into finals. Even though we were knocked out rather quickly in the finals tournament, I'm still extremely proud of where we managed to reach. Our team is made up entirely of freshmen competing in Battlecode for the first time. (Paul doesn't even code)
This is a postmortem about our experience, things we tried that worked well, and how to avoid mistakes we made in the future.
If you didn't participate this year or want an explanation on this year's game, you should read this brief introduction.
You can also check out our bot's source code here.
Table of Contents
Sprint 1
During sprint 1 we worked on establishing a good foundation for our bot. This included setting up the important systems like pathfinding, communication, combat micro, and basic economy. Throughout the competition, we worked on improving these primatives, but our bot remained very similar foundationally to how we structured it during sprint 1.
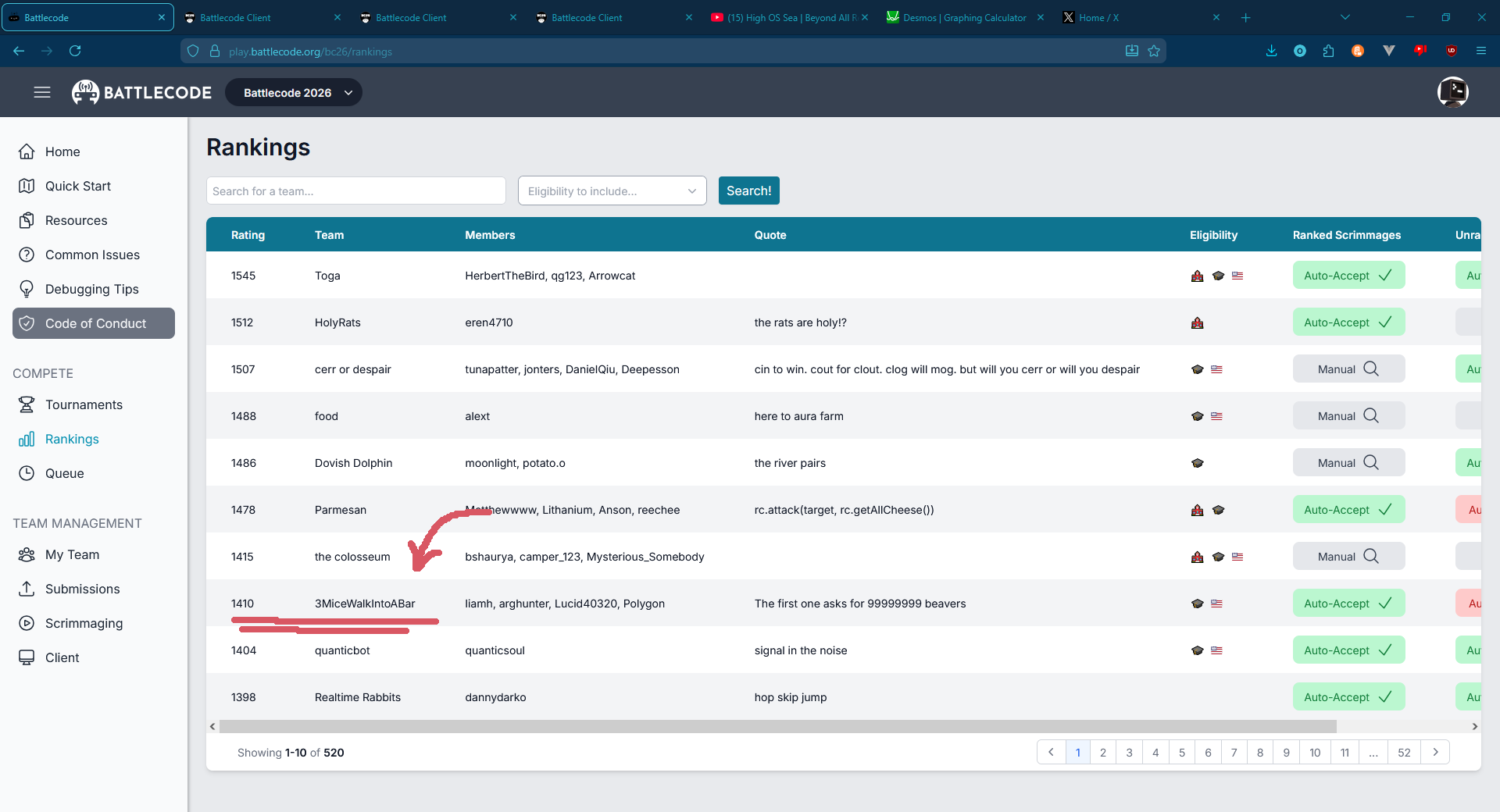
Once the ranked leaderboard opened after a few days, we remained consistently in or near the top 10 teams. For a while at the beginning, we hovered from 4th to 7th place.
One strategy that was especially powerful during sprint 1 was a full rush. Many teams did not have strong enough micro to counter and the sprint 1 maps were all rather open and rotationally symmetric. This was curbed later with more complicated maps and better defense.
State Machine
Behaviour within our bot was handled with an extremely simple state machine. Essentially, every tick, a rat would check which state was stored within the state variable and execute code for that state. We also stored a previousState, which could allow the bot to remember and later resume a state if it got interrupted by the fleeingCat state. Looking back while writing this I realize we could have very easily made this, a switch statement and saved some bytecode.
Here's what it looks like:
public class BabyController {
public static String state = "locateCheese";
public static String previousState = "locateCheese";
private static void goToState(String newState) throws GameActionException {
state = newState;
previousState = newState;
// run any code that should happen when newState is entered
// ...
}
private static void goToStateTemporary(String newState) throws GameActionException {
state = newState;
// run any code that should happen when newState is entered
// ...
}
public static void run(RobotController rc) throws GameActionException {
while(true) {
if (state.equals("locateCheese")) {
if(rc.getRawCheese() > 0) {
goToState("returnCheese");
}
// ...
}
}
}
}Economy
We experimented with various different economy strategies during sprint 1. Initially, rats would begin in the explore state. In this state they would pick random locations on the map to travel to. Once they saw a cheese mine, they would enter the communicateCheeseMineState. In this state, rats would run back to the king and squeak the cheese mine. (More on communications later) Then, the rat would locate, collect, and return cheese using the locateCheese, pickupCheese, and returnCheese states. Rats would also try to collect multiple cheeses before returning.
Later, after analyzing games, we realized that we were losing out on cheese by keeping locating mines and collecting cheese as separate behaviours. So, we combined them. This helped collect cheese a bit faster. We also observed that some of the top teams were not collecting multiple cheeses. We ended up making this change and then never investigating it later.
Pathfinding
Pathfinding actually remained almost unchanged after sprint 1, except for tweaks to bugnav at the very end before U.S. qualifiers.
Our pathfinding began by running a Breadth First Search expansion on adjacent nodes originating at the rat. This was repeated 25 times, essentially expanding the search to 25 tiles. Every expansion marked the cell it expanded with an integer that increased for each iteration. We also tracked and updated which expanded cell was closest to the target location. Then, after expansion, we found the path from this closest cell back to the rat by at every step, picking the tile with the lowest number until eventually we reached back to the rat.
Normally, expansion would cost an unreasonable amount of bytecode. However, I came up with an optimization early on that allowed us to do this with no code generation. Essentially, whenever a rat sees an obstacle like a wall, it records this obstacle into a Map structure. This structure is an array of chars, but what's important is that we have a list of essentially groups of bits which we can look up based on a tile's position. Instead of simply storing whether the tile was passable, we can store passability to other tiles. Here's what each bit represents: (1 is true, 0 is false)
0 - Is this tile impassable 1 - Is the tile to the North impassable 2 - Is the tile to the East impassable 3 - Is the tile to the West impassable 4 - Is the tile to the South impassable
Then, in expansion, we can do a switch over this char. This saves a lot of bytecode because it doesn't check the map during expansion, and we don't need to do separate if statements or map reads for the different directions.

If this Breadth First Search failed because it couldn't find a better move, the rat would fall back to a weird, fake bugnav pathfinding I wrote on the first day. This was eventually changed to bugnav 0 before U.S. Qualifiers.
A note on king pathfinding: At first glance, pathfinding a 3x3 unit might seem significantly more complex. However, we can use the same exact pathfinding code for the king. The only thing we need to change is how we store obstacles. Whenever the king sensed an impassable obstacle, it would mark down a 3x3 location centered on the obstacle as impassable into the map structure.
Temporary obstacles: More on how we dealt with nonpermanent obstacles, such as dirt and units, later.
Cats
During sprint 1, cats were extremely broken. They were super aggressive, but would also often brick next to a wall and get stuck there. We used two strategies to mitigate cats. First, if a rat saw a cat, it would run at half speed in the opposite direction of the king while squeaking. The idea here was to attempt to lead the cat to the other team's king and hope that it would disrupt their side. In retrospect I don't think this ever worked very well since the cats were too unpredictable and rats were easily disrupted by enemies.
Our second strategy was to try to detect if a cat had gotten stuck on a wall. If a rat noticed that it was fleeing multiple times from the same cat who had not moved, it would treat the cat and it's neighboring tiles as an impassable wall and then otherwise ignore the cat. This did help a bit to mitigate economic disruption from a cat bricking on your side and preventing rats from returning to the king.
Communications
Richard wrote the original communications implementation although, Armaan and I had a hand in expanding and improving on it later.
Rats would squeak to signify mine locations to the king, cat locations to fellow rats (although this was later removed), and enemy/ally locations during combat. We experimented with the idea of creating a mesh network where messages would have a ttl and information about the map would be constantly passed around, however this was scrapped since it made the cats more aggressive against us. Before U.S. qualifiers, the cat's behaviour was changed to be less agressive so squeaking more became viable. Unfortunately, we didn't have the time to reimplement and test our network idea.
Most of communications dealt with sharing information from the king to rats through the global array. Everything we wanted to store in the global array essentially had a bit index in the global array and could be read or written to at that bit index. We had handlers to read and write arbitrary bits so that we could store information continuously across the elements. Within the global array, we stored the king's position, mine locations, and a panic mode flag. (Panic mode would trigger if a cat were right next to the king and cause rats to either run or try to attack the cat). We would later expand the king position to allow for multiple positions to support multiple king. We also added a priority mine. More about these later. Mine locations were stored continously and enough space was reserved to store up to 8 mine locations. A part of the global array also stored the number of mine locations currently in the global array. We ended up not using even half of the global array's capacity. We could have done a lot more here or simply added support for storing more mines.
We actually had support within our global array to allow for unit types designated by the king when new rats were built, however we never ended up implementing any distinct rat types for the baby rats.
Sprint 2
Sprint 2 was sort of a mess for us. Early in sprint 2 we found some good improvements. Watching some of Super Cow Power's games, we noticed some interesting techniques. First, rats could collect cheese that was adjacent, not just under them. We also noticed rats could return cheese to the king from a few blocks away. Most importantly though, we noticed an interesting movement technique.
Careful Movement Strafing
Rats had a mechanic where if they moved in a direction they were not facing, they would incur an additional movement penalty. However, this only occurred when attempting to move. Since we can control the order of our actions, we could alternate rotating or moving first to essentially get extra vision range, without a movement penalty.
public class BabyController {
public static boolean lookLeft = false;
public static void moveSmart(Direction direction) throws GameActionException {
if(rc.getDirection() != direction && rc.canTurn(direction)) {
rc.turn(direction);
}
if (rc.canMove(direction)) {
rc.move(direction);
}
if(rc.canTurn()) {
if(lookLeft) {
rc.turn(direction.rotateLeft().rotateLeft());
} else {
rc.turn(direction.rotateRight().rotateRight());
}
lookLeft = !lookLeft;
}
}
}Dealing with Dirt
We also made it a priority to handle dirt on the map. Previously, we had simply treated dirt as a permanent, impassable obstacle. First, we changed pathfinding to treat dirt as passable. Then rats would simply dig dirt if they had to. We also gave the king the ability to place dirt when moving away from a cat. This turned out to be extremely effective at protecting the king.
Taking a Break and Goat Hacks
Partway into sprint 2, I had my flight from California to Massachusetts to partcipate in WPI's hackathon called Goat Hacks. This meant I wasn't able to work on the bot for about 4-5 days. During this time, we dropped from the top 10 in ranked to somewhere around 60th place. On the bright side, Paul and I had a lot of fun creating a DIY live streaming camera doorbell and winning JBL Charge 6 speakers for Best Hardware.


We now own way too many speakers.
Disaster
Once Goat Hacks ended, we realized we were in a dire situation. First, our bot seemed to almost be doing worse against some of it's previous benchmarks. Second, we were not in a good spot rating wise. I figured that somewhere in the last few days, we had introduced multiple bugs into the bot that were significantly impacting performance. Part of the reason this happened is that when testing locally, there was often enough local variation to make a bad change look as if it improved the bot. This is what motivated me to start developing our own game runner and tester.
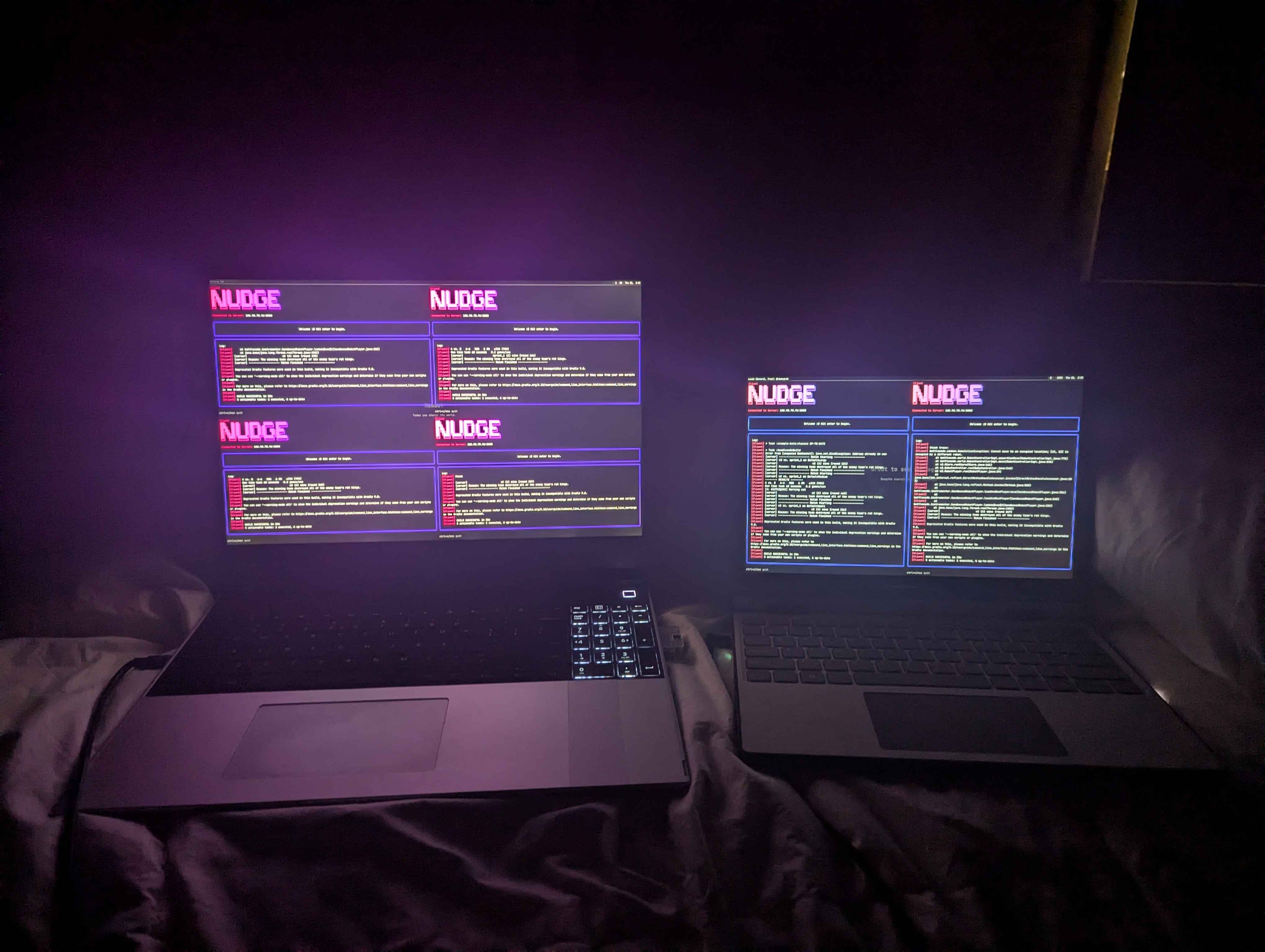
Developing Nudge
The first prototype for Nudge was developed in a single night. Using the prototype, we went through all the recent commits and isolated those that reduced the win rates. Analyzing these commits revealed a number of bugs. After fixing these, the win rate went from under 50% against our benchmark to close to 70%. We submitted this fixed version just in time to make it into sprint 2.
I then spent the next few days learning Go to create a friendly interface for the runner.

I also rewrote the runner to run distributed across multiple machines and make it more user friendly by making it resistant to connection issues. (The moment we tried testing together, Richard and Armaan tried queueing tests at the same time, breaking everything)
Running with our entire cluster got us up to a speed of 1.2 games per second. We were able to run tests of 300-500 games in 5-15 minutes, depending on how many devices were connected.
Once we were able to use Nudge, our policy for making modifications to the bot changed. We implemented the policy where all changes had to be made on a seperate branch accompanied with a pull request. We made sure that before we merged any changes, the tester gave us confidence that the change improved the win rate. We used a 95% confidence interval on the win rates to make this decision.
After Nudge was ready for proper use, I went ahead and made it open source and available to everyone. Here's the repository. I had seen other teams mentioning using game runners and thought that it would hopefully level the playing field a bit if everyone got access to a runner. I know of at least two other teams that ended up using or trying out Nudge, which is pretty awesome.
I do want to make an important point about game runners, though. Using a game runner is NOT necessary at all. Most of the teams in the finals did not use a game runner. Using a game runner to help improve your bot can be helpful, like it helped us discover bugs in our bot, but making actual fundamental improvements to your bot outstrips any benefit you gain by using a runner. I've heard that Teh Devs are a bit worried that game runners might create a situation where those who can afford the most compute are benefited. However, this is certainly not a problem yet. I believe we might have been the only team in the finals that used a game runner.
Combat Micro
Our combat micro was essentially split up into 3 stages. First, if our rat was holding an enemy rat, we would calculate the best direction to throw. This was done by giving a weight to each possible throwing direction and picking the highest one. The weights were based on whether an enemy was in the line of the throw, whether the thrown rat would hit a wall, and whether allies were in the way. If a rat could throw, it always would. Next, we would decide on a direction to move. This was also determined by picking the highest value direction (including not moving). The values of each move were calculated by factors such as:
- being next to an enemy
- in vision of enemy
- behind enemy
- spacing rules to prevent
reactions - moving towards enemies
- moving towards allies
Then the rat would move. After moving, the rat would begin to act. First, it would pick an enemy based on a score. Closer enemies were always weighted higher; otherwise, we simply pick the enemy with the lowest health. Once an enemy is picked, the rat would try to pick up this enemy. If it couldn't, it would then try to attack the enemy.
During combat, our rats would squeak out a micro squeak. This would signify enemy positions to nearby rats. If rats heard this squeak, they would attempt to join the combat and also factor in the positions learned from squeaks in their movement.
One issue we noticed is that sometimes rats could get stuck in micro, trying to attack rats through walls that they would never be able to reach. To combat this, we added an exhaust timer where if a rat had not acted for a certain number of rounds, it would leave combat and go on cooldown for a few turns.
Our combat micro was okay, but it clearly wasn't strong enough. I think this was the main limiting factor preventing us from reaching a higher place in the finals. We saw especially later on that we would often simply lose fights to teams with better micro. I actually noticed this rather early on and spent a lot of time trying to improve our code. I rewrote it multiple times and even took a look at some past teams' combat code. Nothing I tried worked. Next year, this is definitely one of the things I want to prioritize.
Temporary Obstacles
One aspect I added later to pathfinding was handling units as temporary obstacles. Essentially, in our representation of the map, I added a cyclic queue structure where locations could be pushed onto the queue. Every tick, all the locations pushed on the queue during the same tick at the end of the queue were popped off and cleared from the map. This delay was set to 5 ticks. So any location a unit was occupying was considered occupied for 5 ticks. This helped reduce congestion in our pathfinding.
US Qualifiers
The preparation for U.S. qualifier consisted almost entirely of trying to improve our combat micro. Which, sadly for us, did not actually improve. However, I did improve our fallback pathfinding by swapping out my day 1 pathfinding for an actual bugnav 0 implementation. We also managed to implement some handling to allow for multiple kings, although it was extremely basic. If we had enough global cheese, then all baby rats would always try to form a new king every tick. Communications also had support for storing multiple king locations so rats could choose a king to return cheese to. Our code to attack cats was also extremely buggy, so we made a lot of improvements in that area so that our rats would actually team up to kill cats if favorable conditions were met.
I actually got to commentate in person at U.S. Qualifiers. (Perks of showing up in person) I even commentated our own game that qualified us for finals!
Final Tournament
The final tournament was really fun. We got to celebrate Paul's birthday together in person since Richard had flown here from Georgia for the tournament. (We played a few Magic drafts) We also got to meet a lot of really cool people, both competitors and representatives from sponsors.

On String Builders and Code Generation
So during this contest, I set a few goals for our team. First, all of the code we wrote would be completely our own. Up until the very end, when I briefly looked at past particpant's combat micro, everything we had written was made completely uninformed by past battlecode years. Second, none of our code was written by AI. Third, we used no string builders. I do worry that eventually string builders will be banned. I think they are a bit unfairly overpowered at the moment. This wouldn't be an issue if they weren't also extremely slow. Part of the reason we could even run game tests was because our bot didn't abuse string builders. I also don't want to rely on them heavily because we might see string builders banned or at least reworked in the future. (If they aren't by the time I become a dev, I will do something about them) Fourth, we used no code generation. I don't think code generation is really an issue; I just didn't want to deal with setting up code generation. It's very possible we'll use some code generation in the future, though.
Reflections
I am super proud of the team and where we managed to place. We had so much fun. Thanks to Teh Devs for making this experience possible. One day I hope to become a dev as well, but I'm going to have to participate a few more times. I wouldn't want to miss out on the opportunity to compete a bit more.

Thank you to Richard, Armaan, and Paul for being on my team. It was a lot of fun working with you guys.
And to the future teams of next year, watch out. We're gunning for #1.